
Page 10 - 江苏高考物理小题狂做·基础篇
P. 10
4 第一章 直线运动
的加速运动 D. 水滴在各点的速度之比满足 v B∶v C∶v D=1∶3∶5
B. 先做加速度增加的减速运动, 后做加速度减小 11. ( 南京外国语学校期中) 如图所示, 直棒 AB 长
的加速运动 5m , 上端为A 、 下端为B , 在B 的正下方10m 处
C. 先做匀减速运动, 后做匀加速运动, 先后两次加 有一长度为5m , 内径比直棒大得多的固定空心竖
速度大小相等 直管. 手持直棒由静止释放, 让棒做自由落体运动,
D. 先做匀加速运动, 后做匀减速运动, 先后两次加 不计空气阻力, 重力加速度 g=10m / s. 求:
2
速度大小不等 ( 1 ) 直棒下端刚好开始进入空心管时的瞬时速度 v 1 ;
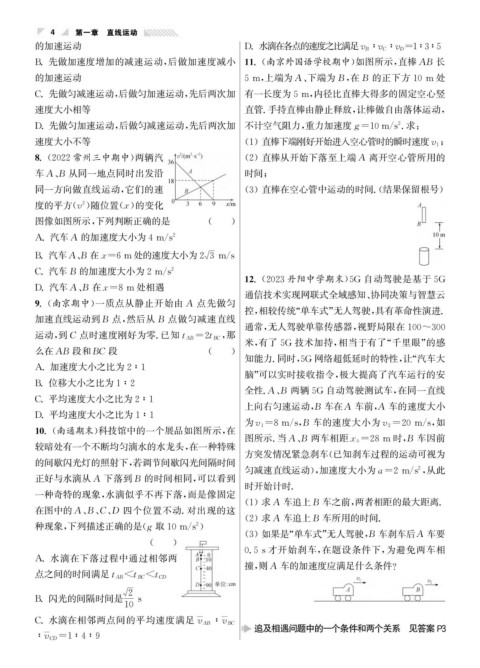
8. ( 2022常州三中期中) 两辆汽 ( 2 ) 直棒从开始下落至上端 A 离开空心管所用的
车A 、 B 从同一地点同时出发沿 时间;
同一方向做直线运动, 它们的速 ( 3 ) 直棒在空心管中运动的时间. ( 结果保留根号)
度的平方( v ) 随位置( x ) 的变化
2
图像如图所示, 下列判断正确的是 ( )
2
A. 汽车A 的加速度大小为4m / s
B. 汽车A 、 B 在x=6m 处的速度大小为23 m / s
2
C. 汽车B 的加速度大小为2m / s
12. ( 2023丹阳中学期末) 5G 自动驾驶是基于5G
D. 汽车A 、 B 在 x=8m 处相遇
通信技术实现网联式全域感知、 协同决策与智慧云
9. ( 南京期中) 一质点从静止开始由 A 点先做匀
控, 相较传统“ 单车式” 无人驾驶, 具有革命性演进.
加速直线运动到B 点, 然后从 B 点做匀减速直线
通常, 无人驾驶单靠传感器, 视野局限在100~300
, 那
运动, 到C 点时速度刚好为零. 已知 t AB=2t BC
米, 有了5G 技术加持, 相当于有了“ 千里眼” 的感
么在AB 段和BC 段 ( )
知能力. 同时, 5G 网络超低延时的特性, 让“ 汽车大
A. 加速度大小之比为2∶1
脑” 可以实时接收指令, 极大提高了汽车运行的安
B. 位移大小之比为1∶2
全性.A 、 B 两辆5G 自动驾驶测试车, 在同一直线
C. 平均速度大小之比为2∶1
上向右匀速运动, B 车在A 车前, A 车的速度大小
D. 平均速度大小之比为1∶1
为 v 1=8m / s , B 车的速度大小为 v 2=20m / s , 如
10. ( 南通期末) 科技馆中的一个展品如图所示, 在
图所示. 当A 、 B 两车相距x 0=28m 时, B 车因前
较暗处有一个不断均匀滴水的水龙头, 在一种特殊
方突发情况紧急刹车( 已知刹车过程的运动可视为
的间歇闪光灯的照射下, 若调节间歇闪光间隔时间
匀减速直线运动), 加速度大小为a=2m / s , 从此
2
正好与水滴从 A 下落到B 的时间相同, 可以看到
时开始计时.
一种奇特的现象, 水滴似乎不再下落, 而是像固定
( 1 ) 求A 车追上B 车之前, 两者相距的最大距离.
在图中的A 、 B 、 C 、 D 四个位置不动. 对出现的这
( 2 ) 求A 车追上B 车所用的时间.
2
g
种现象, 下列描述正确的是( 取10m / s )
( 3 ) 如果是“ 单车式” 无人驾驶, B 车刹车后A 车要
( )
0.5s才开始刹车, 在题设条件下, 为避免两车相
A. 水滴在下落过程中通过相邻两
撞, 则A 车的加速度应满足什么条件?
点之间的时间满足 t AB<t BC<t CD
B. 闪光的间隔时间是 2 s
10
C. 水滴在相邻两点间的平均速度满足v AB ∶v BC
追及相遇问题中的一个条件和两个关系 见答案P3
∶v CD=1∶4∶9